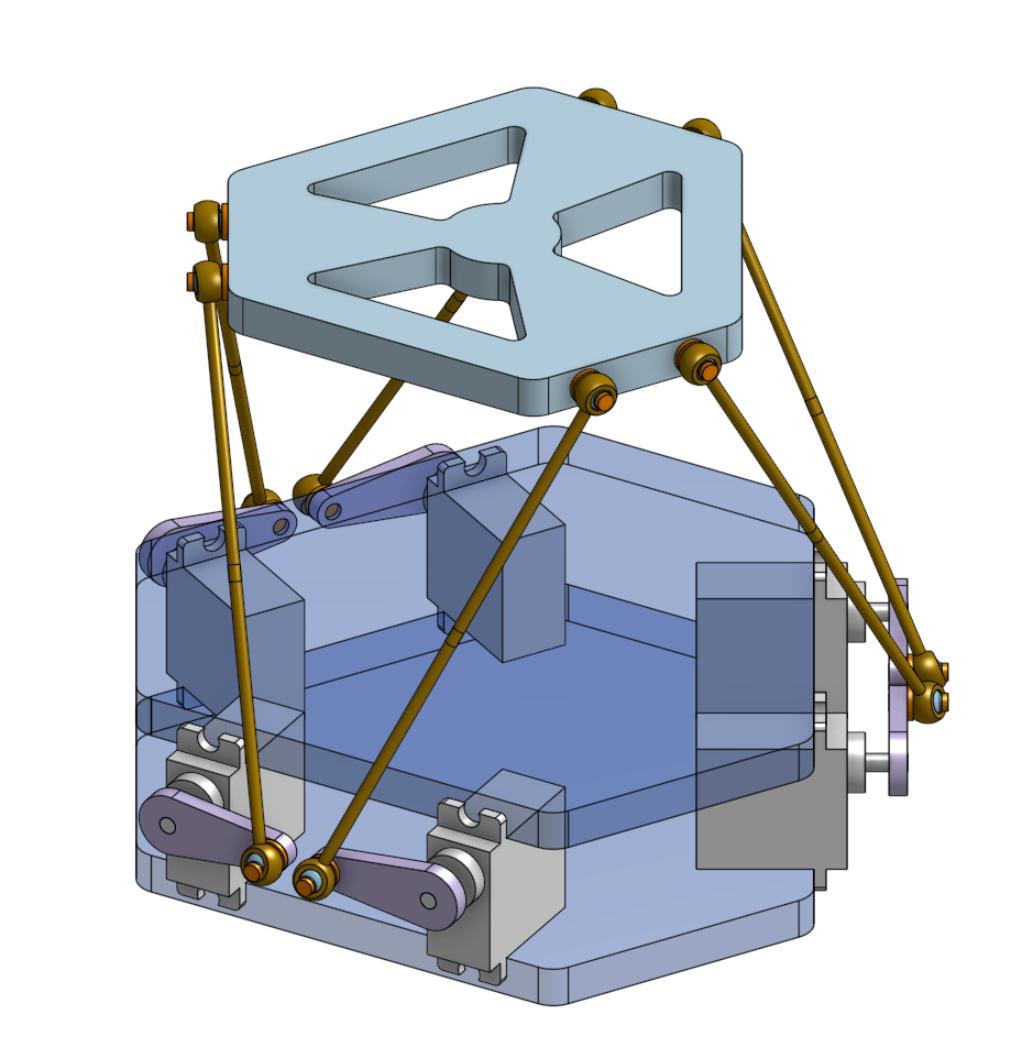
In this project, we first modelled the movable platform of the hexapod using Onshape CAD software. Then we gathered many resources like servo motors, power supplies, microcontrollers, wooden planks, etc., using which we have built the hexapod! Finally, we used the Arduino IDE to excite the motors inorder to make the hexapod follow a predefined trajectory like circular, vibratory, vertical, etc.
Arduino IDEOnshape